
데니스 홍 UCLA 로봇메커니즘연구소장 기조연설서 강조
데니스 홍 UCLA 로봇메커니즘연구소장은 13일 시사저널이코노미가 서울 용산구 그랜드 하얏트 호텔에서 주최한 ‘미래혁신 포럼 2018’에서 로봇의 ‘기계적 지능’을 설명하며 이 같이 설명했다.
이날 행사의 기조연설을 맡은 데니스 홍은 “로봇의 구성요소는 감각(Sense), 계획(Plan), 실행능력(Act)이라고 볼 수 있다. 이중 소프트웨어와 전자 장치가 주관하던 감각, 계획의 영역까지 기계적인 영역으로 대체하려는 고민에서 시작된 것이 기계적 지능”이라고 말문을 열었다.
그러면서 그는“로봇을 소프트웨어만으로 제어하게 되면 많은 비용과 시간이 소요된다. 복잡한 센서나 소프트웨어 제어 없이 기계적인 부분으로 로봇을 통제하고 작동케 하는 것이 기계적 지능의 원리"라고 소개했다.
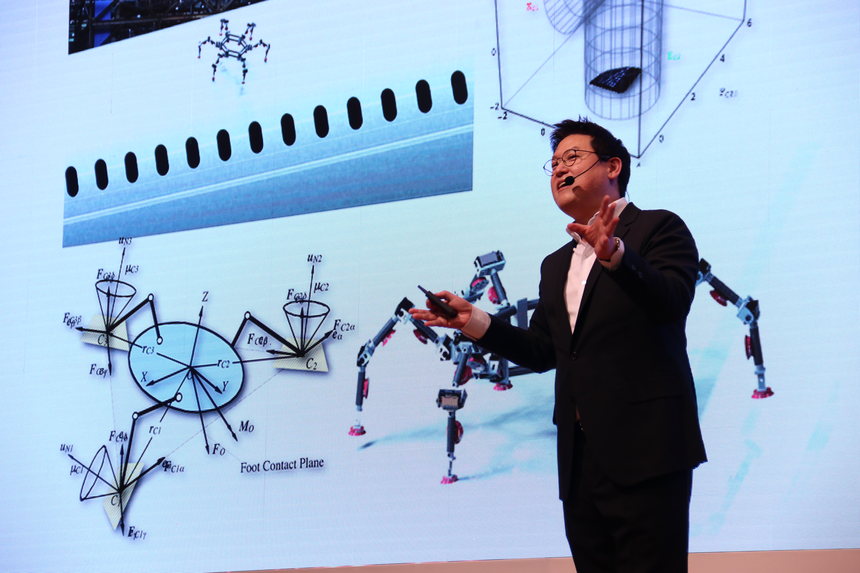
이어 데니스 홍은 연구소에서 직접 개발한 로봇들의 작동 영상을 선보이며 직접 기계적 지능을 설명했다. 영상을 통해 공개된 삼족 보행 로봇 '스트라이더'는 유연한 보행 능력을 드러내며 참관객들의 환호를 이끌어내기도 했다.
이어 공개된 SiLVIA는 항공기 조립 목적으로 개발되는 로봇으로 6개의 다리로 중량이 무거운 짐을 옮기고 벽 사이로 기어 올라가는 등 역동적인 동력성능을 드러냈다. 군함 화재 진압용 로봇 SAFFiR 역시 높은 문턱도 유연하게 넘는 보행 능력을 보였다.
10년간 사람과 닮은 인간형 로봇을 개발해 온 그는 최근 인간형 로봇을 넘어 인간이 가지 못하는 험로, 좁은 통로 등에도 이동할 수 있는 다양한 로봇 개발에 힘써왔다고 밝혔다. 현재 이족보행을 위해 개발된 로봇은 불안정하거나 이동 속도가 느리며, 비용이 많이 드는 등 상용화에 있어 현실적인 장벽이 높은 까닭이다.
데니스 홍은 "로봇이 사람처럼 생겨야 한다는 고정관념을 깨면 문제를 간단하게 설명할 수 있다. 발상의 전환이 필요하다"며 "많은 연구자들이 우선 로봇의 하드웨어를 만들고 소프트웨어를 설계해 억지로 하드웨어를 조작하려고 한다.그러나 기계적으로 적절하게만 설계하면 이론적으로는 아무런 소프트웨어 없이도 제어가 가능하다"고 설명했다.
데니스 홍은 이족보행에 국한하지 않고 다양한 기술과 공학적 원리를 통해 이동성이 크게 개선된 로봇을 연구하며 나섰다. 그는 현재 지뢰제거용, 재난구출용 로봇 등 사람을 돕는 로봇 개발에 주력하고 있다.
이어 그는 "어떤 과학 기술을 개발해도 사회에 어떤 영향을 미칠지 고려해야 한다"며 인공지능과 로봇 개발에 대한 윤리관을 드러내기도 했다. 데니스 홍은 “내가 만든 로봇에 무기가 장착되는 것을 원치 않는다”며 "그러나 항상 기술이 원하지 않는 방향으로 사용될 수 있다는 점에 대해 고민을 많이 했다. 만족할만한 답은 안 나왔지만 누군가는 로봇을 만들어야 한다면 적어도 내가 옳은 방향으로 만들고 추구해야 한다는 결론에 도달했다. 로봇 뿐만 아니라 과학 기술을 옳게 사용하는 것은 인간에게 달렸다”고 설명했다.